
In questo articolo:
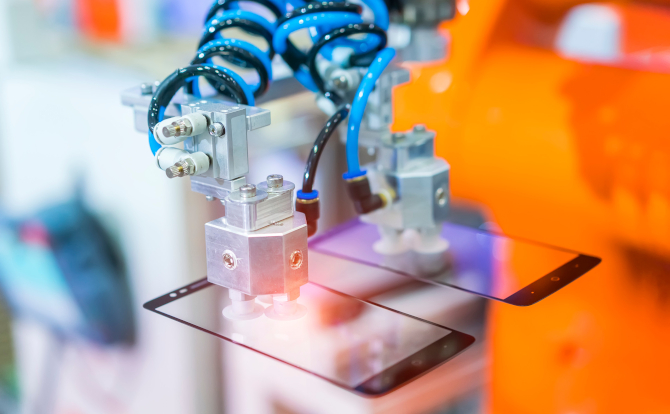
TogglePick and Place è una tipologia di operazione automatizzata che consiste nel prelevare (pick) un oggetto da una posizione e depositarlo (place) in un’altra, attraverso l’uso di bracci robotici, sistemi cartesiani o dispositivi meccatronici. È una delle attività più diffuse nell’automazione industriale, soprattutto nelle linee di produzione, confezionamento e assemblaggio.
Questo tipo di applicazione è fondamentale per svolgere compiti ripetitivi, ad alta frequenza e con elevata precisione, dove velocità e affidabilità sono essenziali. I sistemi Pick and Place possono lavorare con oggetti rigidi, flessibili, fragili o irregolari, grazie all’integrazione di pinze (gripper) meccaniche, a vuoto, magnetiche o adattive, spesso assistite da sensori e visione artificiale.
Come funziona nella pratica
Un sistema Pick and Place è composto da:
-
un sistema di presa (gripper),
-
un meccanismo di movimento (robot articolato, cartesiano, SCARA o Delta),
-
e una logica di controllo (PLC o controller robotico), eventualmente integrata con telecamere e sistemi di visione per il riconoscimento degli oggetti.
Il ciclo tipico prevede che l’oggetto venga individuato e localizzato, prelevato in modo controllato, quindi spostato e rilasciato nella posizione designata, che può variare da un nastro trasportatore a un contenitore, una scatola o una successiva fase di lavorazione.
L’intero processo può essere completamente automatizzato e adattabile a lotti variabili, anche con oggetti misti, se supportato da software evoluti.
Esempi di utilizzo del Pick and Place
- Nell’industria elettronica, per il posizionamento ad alta precisione di micro-componenti su schede a circuito stampato (SMT – Surface Mount Technology).
- Nel settore alimentare, per il confezionamento automatico di prodotti da forno, cioccolatini o frutta in vaschette, senza danneggiarli.
- Nella logistica automatizzata, per il prelievo e smistamento di pacchi o articoli in un magazzino robotizzato.
- In ambienti farmaceutici, per il trasferimento sterile di flaconi, blister o siringhe lungo le linee di confezionamento primario e secondario.
Perché è importante
Il Pick and Place è una delle applicazioni base ma strategiche della robotica industriale, perché migliora l’efficienza, riduce gli errori umani e consente di aumentare la velocità di produzione mantenendo la qualità costante.
Oggi, grazie all’evoluzione dei cobot e dei sistemi di visione 3D, queste operazioni sono sempre più flessibili, sicure e intelligenti, capaci di gestire non solo oggetti standardizzati, ma anche pezzi irregolari o variabili. In questo modo, il Pick and Place diventa un elemento chiave per una produzione moderna, scalabile e adatta a lotti sempre più personalizzati.


